
В настоящее время наблюдается небывалый интерес к конструированию различных летающих механизмов – дронов, планеров, глайдеров, вертолетов и т.д. Сейчас их можно легко сконструировать самостоятельно благодаря большому количеству материалов по ним в сети интернет. Все эти летающие механизмы используют для своего движения так называемые бесщёточные (бесколлекторные) электродвигатели постоянного тока (BLDC - Brushless DC Motor). Что представляют собой подобные двигатели? Почему именно они сейчас используются в различных летающих дронах? Как правильно купить подобный двигатель и подключить его к микроконтроллеру? Что такое ESC и почему мы будем его использовать? Ответы на все эти вопросы вы найдете в данной статье.

В этой статье мы рассмотрим управление скоростью вращения бессенсорного бесколлекторного электродвигателя постоянного тока A2212/13T (Sensorless BLDC outrunner motor), часто используемого для конструирования дронов, с помощью ESC (Electronic Speed Controller – электронный контроллер скорости) и платы Arduino.
Необходимые компоненты
- Плата Arduino Uno (купить на AliExpress).
- A2212/13T BLDC Motor (бесколлекторный электродвигатель постоянного тока).
- ESC (20A) (электронный контроллер скорости) (купить на AliExpress).
- Источник питания (12V 20A).
- Потенциометр 10 кОм (купить на AliExpress).
Принцип действия BLDC двигателей
Бесколлекторные электродвигатели постоянного тока (BLDC двигатели) в настоящее время часто используются в потолочных вентиляторах и электрических движущихся транспортных средствах благодаря их плавному вращению. В отличие от других электродвигателей постоянного тока BLDC двигатели подключаются с помощью трех проводов, выходящих из них, при этом каждый провод образует свою собственную фазу, то есть получаем трехфазный мотор.
Хотя BLDC относятся к двигателям постоянного тока они управляются с помощью последовательности импульсов. Для преобразования напряжения постоянного тока в последовательность импульсов и распределения их по трем проводникам используется контроллер ESC (Electronic speed controller). В любой момент времени питание подается только на две фазы, то есть электрический ток заходит в двигатель через одну фазу, и покидает его через другую. Во время этого процесса запитывается катушка внутри двигателя, что приводит к тому, что магниты выравниваются по отношению к запитанной катушке. Затем контроллер ESC подает питание на другие два провода (фазы) и этот процесс смены проводов, на которые подается питание, продолжается непрерывно, что заставляет двигатель вращаться. Скорость вращения двигателя зависит от того как быстро подается энергия на катушку двигателя, а направление вращения – от порядка смены фаз, на которые поочередно подается питание.
Существуют различные типы BLDC двигателей – давайте рассмотрим основные из них. Различают Inrunner и OutRunner BLDC двигатели. В Inrunner двигателях магниты ротора находятся внутри статора с обмотками, а в OutRunner двигателях магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. То есть в Inrunner (по этому принципу конструируется большинство двигателей постоянного тока) ось внутри двигателя вращается, а оболочка остается неподвижной. А в OutRunner сам двигатель вращается вокруг оси с катушкой, которая остается неподвижной. OutRunner двигатели особенно удобны для применения в электрических велосипедах, поскольку внешняя оболочка двигателя непосредственно приводит в движение колесо велосипеда, что позволяет обойтись без механизма сцепления. К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.

Примечание: существует еще такой тип BLDC двигателей как бесстержневой (coreless), который находит применение в "карманных" дронах. Эти двигатели работают по несколько иным принципам, но рассмотрение принципов их работы выходит за рамки данной статьи.
BLDC двигатели с датчиками (Sensor) и без датчиков (Sensorless). Для BLDC двигателей, которые вращаются плавно, без рывков, необходима обратная связь. Поэтому контроллер ESC должен знать позиции и полюса магнитов ротора чтобы правильно запитывать статор. Эту информацию можно получить двумя способами: первый из них заключается в размещении датчика Холла внутри двигателя. Датчик Холла будет обнаруживать магнит и передавать информацию об этом в контроллер ESC. Этот тип двигателей называется Sensor BLDC (с датчиком) и он находит применение в электрических движущихся транспортных средствах. Второй метод обнаружения позиции магнитов заключается в использовании обратной ЭДС (электродвижущей силы), генерируемой катушками в то время когда магниты пересекают их. Достоинством этого метода является то, что он не требует использования каких либо дополнительных устройств (датчик Холла) – фазовый провод самостоятельно используется в качестве обратной связи благодаря наличию обратной ЭДС. Этот метод используется в двигателе, рассматриваемом в нашей статье, и именно он чаще всего применяется в дронах и других летающих устройствах.
Почему дроны и вертолеты используют именно BLDC двигатели?
Сейчас существует множество различных типов дронов – с двумя лопастями, с четырьмя лопастями и т.д. Но все они используют именно BLDC двигатели. Почему именно их, ведь BLDC двигатели стоят дороже чем обычные электродвигатели постоянного тока?

Существует несколько причин для этого:
- большой крутящий момент, который очень важен для того чтобы оторвать летающее средство от земли;
- эти двигатели доступны в формате OutRunner, что позволяет обойтись без сцепления в конструкции дрона;
- маленький уровень вибраций во время работы, что очень важно для неподвижного зависания дрона в воздухе;
- хорошее соотношение мощности к весу двигателя. Это очень важно для использования на летающих механизмах чтобы все элементы его конструкции имели как можно меньший вес. Обычный двигатель постоянного тока, обеспечивающий такой же крутящий момент как и BLDC двигатель, будет как минимум в два раза тяжелее него.
Зачем нужен контроллер ESC
Как мы уже знаем, для функционирования BLDC двигателей необходим какой-нибудь контроллер, который преобразует напряжение постоянного тока от батарейки в последовательность импульсов, подаваемую в определенном порядке на провода (фазы) двигателя. Этот контроллер называется ESC (Electronic Speed Controller – электронный контроллер скорости). Основной обязанностью данного контроллера является правильная подача питания на провода BLDC двигателя чтобы двигатель вращался в нужном направлении. Это осуществляется с помощью считывания обратной ЭДС (back EMF) с каждого провода и подачи питания на катушку в то время когда магнит пересекает ее. Внутри себя контроллер ESC содержит достаточно много разнообразной электроники и при желании вы можете подробно изучить его устройство по соответствующим материалам в сети интернет. Здесь же мы кратко рассмотрим рассмотрим только основные компоненты его конструкции.

Управление скоростью вращения на основе ШИМ (широтно-импульсной модуляции, в англ. PWM). Контроллер ESC может управлять скоростью вращения BLDC двигателя при помощи считывания сигнала ШИМ подаваемого на его оранжевый провод. Принцип управления им очень похож на управление сервомоторами. Сигнал ШИМ, подаваемый на контроллер ESC, должен иметь период 20ms, а коэффициент заполнения этого ШИМ сигнала будет определять скорость вращения BLDC двигателя. Поскольку точно такой же принцип используется для управления углом поворотом сервомотора, то для управления BLDC двигателем мы можем использовать библиотеку для управления сервомоторами. Если вы не сталкивались с этим принципом ранее, то вы можете прочитать статью о подключении сервомотора к плате Arduino.
Battery Eliminator Circuit (BEC) – цепь, исключающая батарею. Почти все контроллеры ESC поставляются с этой схемой. Как следует из ее названия, данная схема устраняет потребность в использовании отдельной батареи для питания микроконтроллера, то есть в данном случае нам не понадобится отдельный источник питания для платы Arduino – контроллер ESC сам обеспечит плату Arduino регулируемым напряжением питания +5V. В различных контроллерах ESC используются различные схемы регулировки данного напряжения, но в большинстве случаев распространена схема с линейной регулировкой.
Встроенное ПО. Каждый контроллер ESC содержит в своем ПЗУ встроенную прикладную программу, написанную производителем контроллера. Эта программа во многом определяет логику функционирования контроллера. Наиболее популярными встроенными программами для контролеров ESC являются Traditional, Simon-K и BL-Heli. Эта программа может изменяться пользователем, однако мы в этой статье не будем рассматривать данный вопрос.
Некоторые термины, используемые в тематике BLDC и ESC
При изучении принципов работы BLDC двигателей и контроллеров ESC вы можете столкнуться с некоторыми терминами, используемыми в данной тематике. Кратко рассмотрим основные из этих терминов.
Braking (торможение) – определяет насколько быстро BLDC двигатель может остановить свое вращение. Это особенно актуально для летающих средств (дронов, геликоптеров и т.д.) поскольку они вынуждены часто изменять количество оборотов двигателя в минуту чтобы маневрировать в воздухе.
Soft Start (плавный пуск, старт) – эта способность особенно важна для BLDC двигателей когда вращающий момент от него на исполнительный механизм (колесо, винт и т.д.) передается через механизм передач, обычно состоящий из шестерен. Плавный пуск означает, что двигатель не начнет сразу вращаться с максимальной скоростью, а будет увеличивать свою скорость вращения постепенно независимо от того, с какой скоростью нарастает управляющее воздействие. Плавный пуск значительно снижает износ шестерен, входящих в передаточный механизм.
Motor Direction (направление вращения двигателя) – обычно направление вращения BLDC двигателей не изменяется в процессе эксплуатации, однако во время сборки и тестирования работы изделия может потребоваться изменение направления вращения двигателя, обычно это можно сделать просто поменяв местами любые два провода двигателя.
Low Voltage Stop (остановка при низком напряжении питания). Обычно BLDC двигатели калибруют так, чтобы при одинаковом уровне управляющего воздействия скорость его вращения была постоянной. Однако этого трудно достигнуть потому что со временем напряжение питающей батареи уменьшается. Чтобы предотвратить это обычно контроллеры ESC программируют таким образом чтобы они останавливали работу BLDC двигателя когда напряжение питающей батареи опускается ниже определенной границы. Особенно эта функция полезна при использовании BLDC двигателей в дронах.
Response time (время отклика, время реакции, время ответа). Означает способность двигателя быстро изменять скорость вращения при изменении управляющего воздействия. Чем меньше время реакции, тем лучше контроль над двигателем.
Advance (движение вперед). Эта проблема является своеобразной "ахиллесовой пятой" для BLDC двигателей. Все BLDC двигатели имеют хотя бы небольшой подобный баг. Эта проблема вызвана тем, что когда катушка статора запитана ротор движется вперед поскольку на нем есть постоянный магнит. И когда управляющее напряжение с этой катушки снимают (чтобы подать его на следующую катушку) ротор продвигается вперед немного дальше чем предусмотрено логикой функционирования двигателя. Это нежелательное продвижение двигателя вперед в англоязычной литературе называют “Advance” и оно может приводить к нежелательным вибрациям, нагреву и шуму при работе двигателя. Поэтому хорошие контроллеры ESC стараются по возможности устранить этот эффект в работе BLDC двигателей.
Работа схемы
Схема подключения BLDC двигателя и контроллера ESC к плате Arduino представлена на следующем рисунке.

Как видите, схема достаточно проста. Контроллеру ESC необходим источник питания с напряжением 12V и током как минимум 5A. Для питания схемы можно использовать адаптер или Li-Po батарейку. Три фазы (провода) BLDC двигателя необходимо подсоединить к трем выходным проводам контроллера ESC – неважно в каком порядке.
Предупреждение: у некоторых контроллеров ESC нет выходных проводов, в этом случае вам необходимо будет припаивать провода от BLDC двигателя к контактам контроллера ESC. Обязательно изолируйте эти оголенные места (пайки) с помощью изоляционной ленты потому что через эти провода возможно протекание достаточно больших токов и любое короткое замыкание может привести к повреждению двигателя и контроллера ESC.
Схема BEC (Battery Eliminator circuit) в контроллере ESC будет самостоятельно обеспечивать (регулировать) постоянное напряжение +5V, поэтому его можно непосредственно использовать для питания платы Arduino. Для управления скоростью вращения двигателя в схеме используется потенциометр, подключенный к контакту A0 платы Arduino.
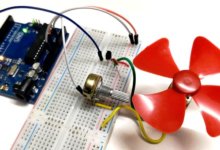
Внешний вид собранной конструкции показан на следующем рисунке.

Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы рассмотрим только его основные фрагменты.
Для управления BLDC двигателем мы будем формировать ШИМ сигнал с частотой 50 Гц и изменяемым от 0 до 100% коэффициентом заполнения. Значение коэффициента заполнения будет управляться с помощью потенциометра. То есть, вращая потенциометр, мы будем управлять скоростью вращения двигателя. Как уже указывалось, управление BLDC двигателем очень похоже на управление сервомотором с помощью ШИМ 50 Гц, поэтому в данном случае мы будем использовать ту же самую библиотеку, которую использовали для управления сервомотором. Если вы начинающий в изучении платформы Arduino, то перед дальнейшим прочтением данной статьи рекомендуем вам изучить принципы формирования ШИМ сигнала в Arduino и подключение сервомотора к плате Arduino.
ШИМ сигнал можно генерировать только на тех цифровых контактах платы Arduino, которые обозначены символом ~. В нашей схеме мы будем управлять контроллером ESC с контакта 9 платы Arduino, поэтому следующей командой мы прикрепим контроллер ESC к этому контакту:
|
1 |
ESC.attach(9); |
Коэффициент заполнения ШИМ (от 0 до 100%) управляется с помощью положения ручки потенциометра. То есть когда на выходе потенциометра у нас будет 0V (0 на выходе АЦП), у нас коэффициент заполнения будет равен 0, а когда на выходе потенциометра будет 5V (1023 на выходе АЦП), коэффициент заполнения ШИМ будет равен 100%. Поэтому мы будем использовать функцию, которая будет считывать значение с выхода АЦП контакта A0.
|
1 |
int throttle = analogRead(A0); |
Затем мы должны конвертировать полученное значение (оно будет в диапазоне от 0 до 1023) в диапазон от 0 до 180. В дальнейшем значение 0 у нас будет означать 0% коэффициент заполнения ШИМ, а значение 180 – 100% коэффициент заполнения ШИМ. Конвертация значения из диапазона 0-1023 в диапазон 0-180 будет осуществляться с помощью функции:
|
1 |
throttle = map(throttle, 0, 1023, 0, 180); |
В дальнейшем мы должны передать это значение в функцию управления двигателем, чтобы сформировать соответствующий ШИМ сигнал на необходимом нам контакте. Поскольку мы дали нашему серво объекту имя ESC, то команда для управления им будет выглядеть следующим образом:
|
1 |
ESC.write(throttle); |
Тестирование работы схемы
Сделайте все необходимые соединения в схеме, загрузите программу в плату Arduino и подайте питание на контроллер ESC. Убедитесь в том, что ваш BLDC двигатель надежно закреплен, иначе он будет прыгать во время вращения. Когда вы подадите питание на контроллер ESC вы услышите приветственный тон и он будет издавать этот звук до тех пор пока не поступит управляющий сигнал заданного уровня (в заданных границах). Начните постепенно вращать ручку потенциометра чтобы на его выходе напряжение стало отличным от 0, и этот звук прекратится. Это будет означать, что вы подали на контроллер ШИМ сигнал минимально допустимого уровня. При дальнейшем вращении ручки потенциометра двигатель начнет медленно вращаться. При дальнейшем повороте ручки потенциометра и увеличении напряжения на его выходе скорость вращения двигателя будет увеличиваться. Когда напряжение достигнет верхней допустимой границы двигатель остановится. В дальнейшем вы можете повторить весь этот процесс заново.
Исходный код программы (скетча)
Если у вас возникнут какие либо вопросы по тексту данной программы, вы можете задать их в комментариях к данной статье.
|
1 2 3 4 5 6 7 8 9 10 11 12 |
#include <Servo.h> //используем библиотеку сервомотора для формирования нужного нам ШИМ сигнала Servo ESC; //даем имя нашему servo объекту, в нашем случае это будет имя ESC void setup() { ESC.attach(9); //"прикрепляем" контроллер ESC к контакту 9 платы Arduino } void loop() { int throttle = analogRead(A0); //считываем напряжение с выхода потенциометра throttle = map(throttle, 0, 1023, 0, 180); //конвертируем значения из диапазона 0-1023 с выхода АЦП в диапазон 0-180 потому что сервомоторы могут работать только в диапазоне 0-180 ESC.write(throttle); //генерируем ШИМ сигнал с необходимым коэффициентом заполнения } |
Видео, демонстрирующее работу схемы
Похожие статьи


 (Проголосуй первым!)
(Проголосуй первым!)
Автор, в ссылке на Али контролер с выводами для питания щеточного двигателя. То есть с двумя выводами.
В видео приводится другой контролер
Хорошо, спасибо за подсказку. Исправил ссылку.
Мне непонятен один момент, если можно, поясните пожалуйста.
У вас двигатель A2212/13T подключен к контроллеру ESC (20A).
Значит ли это, что для питания такого контроллера во время отладки мне обязательно использовать
источник питания с максимальным выходным током 20А. У меня такого источника питания просто нет.
Мой лабораторный БП выдает максимальный ток всего 10А, а отладочные БП и того меньше.
Получается, что я не могу его использовать при отладке такой схемы?
Если попытаюсь запитать, мой блок питания сгорит? Я заметил, что на видео из ютуба подобные проекты почему-то всегда запитывают только от батареек или аккумуляторов.
По этой причине, или у них просто прикол такой?
И еще вопрос. Мне не удалось достать ESC (20A), но удалось раздобыть ESC (35A).
Могу ли я использовать этот ESC (35A) для работы с двигателем A2212/13T?
Или мне обязательно искать именно ESC (20A)?
Простите за вопросы, я начинающий в этом "дирежаблестроении".
20A - это максимальный ток, который способен выдержать контроллер, но ток может быть и меньше. И в описании схемы написано для питания схемы можно использовать адаптер или Li-Po батарейку, и что используемый ток в этом проекте всего 5 А (минимум). Поэтому если вы подадите 10А на ESC (20A), то ничего с ним не случится, но я бы советовал начать с тока меньшей величины, а потом увеличивать его при необходимости. ESC (35A) можно использовать вместо ESC (20A) если вы не собираетесь подавать на него такой гигантский ток, а то двигатель может сгореть, а не контроллер.
У меня возникла проблема при попытке использовать эту схему совместно с широко распространенным двухстрочным ЖК индикатором 1602, подключенным через плату I2C. (Я хотел бы отображать на экране показания потенциометра для регулирования скорости двигателя).
Если включать по-отдельности, то ваша схема и экранчик прекрасно работают. Экранчик запитываю от УСБ - все работает.
Моторчик запитываю от контроллера без экранчика - тоже работает, а когда пытаюсь ардуинку с экранчиком запитать от контроллера, то экранчик перестает работать и моторчик не запускается. Контроллер прерывисто пикает, слегка подергивает мотор, но не запускает его. Как думаете, в чем может быть проблема одновременного подключения к ардуинке экранчика и мотора? Встречалось ли вам что-то подобное? Буду благодарен, если подскажете что-нибудь.
Возможно, питания не хватает. Попробуйте мотор запитать от контроллера, а плату Ардуино с экраном - через USB
Спасибо за помощь, разобрался. Дело было не столько в напряжении питания, сколько в стабильности питания. Контроллер выдает недостаточно стабильное напряжение. Оно почему-то пульсирует сильнее, чем нужно и это нарушает стабильность обмена пакетами по шине I2C.
Понятно. Я рад что у вас получилось
Вот тут подробнее. У вас хороший гайд, но не описан способ как пройти калибровку, в ролике все понятно и есть способ заложить калибровку в программу изначально. Так же там есть некоторые нюансы программирования и задавание параметров вращения (https://www.youtube.com/watch?v=8xGrPpXyc5w&t=3s)
Хорошо, я надеюсь рекомендованный вами ролик восполнит этот пробел
Можно ли подключить к ардуино больше одного мотора, если да, то куда девать выходы 5в?
Ну здесь Ардуино используется только для управления работой контроллера ESC, поэтому с ее помощью теоретически можно управлять стольким количеством таких моторов, сколько у нее контактов для формирования ШИМ сигнала. В данном случае плата Ардуино будет получать питание только от одного контроллера ESC, у остальных контроллеров выводы 5 В можно оставить не подключенными.
Добрый вечер, а мотор будет работать если подключить напрямую аккомулятор -esc-бк мотор?
Добрый день, возможно будет если это предусмотрено встроенным ПО контроллера ESC и это будет, скорее всего только с какой то определенной скоростью (наверное максимальной) и без подключенного микроконтроллера или платы Arduino вы не сможете тогда этим управлять. В общем, здесь нужно смотреть даташит на конкретный контроллер чтобы выяснить это.
как понять, сгорел двигатель или нет? пыталась подключить, вроде бы всё правильно, издал три коротких писка, но с пультом радиоуправления никак больше не реагирует
А вы через контроллер ESC подключали, как в статье, или каким то другим образом?