Робот, следующий вдоль линии (Line Follower Robot), является одним из самых простых видов роботов, конструируемых радиолюбителями-энтузиастами. В данной статье мы рассмотрим создание подобного робота на основе микроконтроллера PIC16F877A. Это 40-контактный микроконтроллер общего назначения, который мы ранее достаточно часто использовали в наших обучающих статьях про микроконтроллеры PIC.


Также на нашем сайте вы можете посмотреть другие проекты роботов, следующих вдоль линии:
Необходимые компоненты
- Микроконтроллер PIC16F877A (купить на AliExpress).
- Инфракрасный датчик – 2 шт. (купить на AliExpress).
- Держатель микросхем на 40 контактов (купить на AliExpress).
- Программатор PICkit 3 (купить на AliExpress).
- Кварцевый генератор 20 МГц (купить на AliExpress).
- Конденсаторы 22 пФ (2 шт.), 0,1 мкФ и 10 мкФ (купить на AliExpress).
- Регулятор напряжения 7805 (купить на AliExpress).
- Драйвер двигателей L293D (купить на AliExpress).
- Электродвигатель постоянного тока – 2 шт.
- Шасси робота.
- Power bank (или другой аналогичный источник питания).
- Перфорированная плата и соединительные провода.
Реклама: ООО «АЛИБАБА.КОМ (РУ)» ИНН: 7703380158
Принцип работы робота, следующего вдоль линии
Следующий вдоль линии робот способен обнаруживать/отслеживать линию с помощью пары инфракрасных датчиков. Каждый инфракрасный датчик имеет в своем составе инфракрасный передатчик (IR Transmitter) и инфракрасный приемник (IR receiver), роль которого выполняет фотодиод. Инфракрасный передатчик излучает инфракрасный свет, а инфракрасный приемник принимает эти отраженные от препятствия лучи (если оно есть). При этом не все поверхности способны хорошо отражать инфракрасные лучи, некоторые поверхности практически полностью поглощают эти лучи. К примеру, от светлой (белой) поверхности инфракрасные лучи отражаются хорошо, а вот черной поверхностью они полностью поглощаются как показано на рисунках ниже. На этих свойствах инфракрасного цвета и будет основан принцип работа нашего робота, следующего вдоль линии.




Внешний вид инфракрасного датчика показан на следующем рисунке.


Таким образом, в составе нашего проекта будет два инфракрасных датчика, которые будут отслеживать местоположение линии и два двигателя, которые будут перемещать робота вдоль этой линии. Эти двигатели будут потреблять достаточно большой ток и должны быть двунаправленными, поэтому для управления ими в нашем проекте мы использовали модуль драйвера двигателей L293D. Обрабатывать данные с инфракрасных датчиков и управлять работой двигателей в нашем проекте будет микроконтроллер PIC. Структурная схема работы проекта показан на следующем рисунке (только в ней Raspberry Pi замените на микроконтроллер PIC).


Если ни один из датчиков не будет обнаруживать черную линию, то робот будет двигаться прямо. Эта ситуация показана на нижеприведенном рисунке.




Если правый датчик обнаруживает черную линию, то робот поворачивает вправо.


Если оба датчика обнаруживают черную линию, робот останавливается.


В нашем проекте мы использовали два инфракрасных датчика (сенсора), которые мы назовем левым датчиком и правым датчиком.
Схема проекта
Схема робота, следующего вдоль линии, на основе микроконтроллера PIC16F877A представлена на следующем рисунке.

«Глазами» робота в нашем проекте являются два инфракрасных датчика, также подключенных к микроконтроллеру PIC16F877A. При обнаружении белого цвета на выходе данных датчиков будет логическая «1», а при обнаружении черного цвета на их выходе будет логический «0».
Полная схема соединений проекта приведена в следующей таблице.
| № п/п | Контакт в схеме | Контакт микроконтроллера PIC |
| 1 | вых. контакт левого датчика | RD2 (pin 21) |
| 2 | вых. контакт правого датчика | RD3 (pin 22) |
| 3 | Motor 1 Channel A pin | RC4 (pin 23) |
| 4 | Motor 1 Channel B pin | RC5 (pin 25) |
| 5 | Motor 2 Channel A pin | RC6 (pin 26) |
| 6 | Motor 2 Channel B pin | RC7 (pin 27) |
Для питания схемы мы использовали power bank, который на своем выходе обеспечивает +5V через USB порт, поэтому мы обошли (не использовали регулятор напряжения 7805) и с его выхода непосредственно запитали микроконтроллер PIC, датчики и двигатели. Вы же с помощью регулятора 7805 можете использовать для питания схемы батарейки на 9 или 12V.
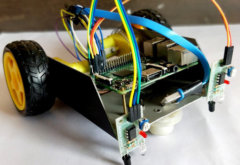
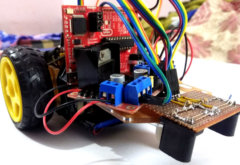
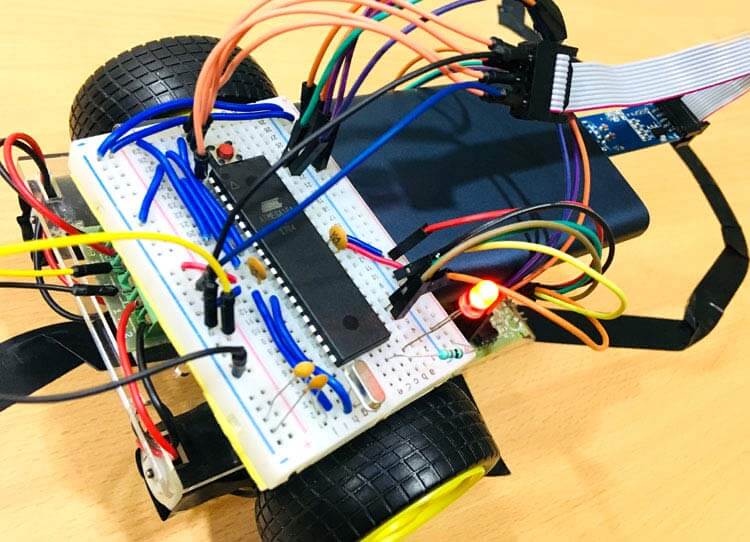
Внешний вид собранной конструкции робота показан на следующих рисунках.
")

")

Объяснение программы для микроконтроллера PIC
Полный код программы приведен в конце статьи, здесь же мы кратко рассмотрим его основные фрагменты.
Первым делом в программе инициализируем используемые контакты. У нас два контакта будут работать на ввод данных (к ним подключены инфракрасные датчики) и четыре контакта – на вывод данных (с них будет осуществляться управление двигателями).
|
1 2 3 |
TRISD2 = 1; TRISD3 = 1; //Bath the IR sensor pins are declared as input TRISC4 = 0; TRISC5 = 0; //Motor 1 pins declared as output TRISC6 = 0; TRISC7 = 0; //Motor 2 pins declared as output |
После этого нам необходимо считывать состояние контактов, к которым подключены инфракрасные датчики, и в зависимости от их состояния осуществлять управление двигателями. К примеру, если на выходах обоих датчиков уровень high (то есть ни один из датчиков не видит черную линию), то робот должен двигаться прямо.
|
1 2 3 4 5 |
if (RD2==1 && RD3==1) //Both sensor not over balck line { RC4=0; RC5=1; //Motor 1 forward RC6=1; RC7=0; //Motor 2 forward } |
Если левый датчик обнаруживает черную линию, то робот должен двигаться влево, для этого нужно остановить двигатель 1, а двигатель 2 вращать в прямом направлении.
|
1 2 3 4 5 |
else if (RD2==0 && RD3==1) //Left sensor is over black line { RC4=1; RC5=1; //Motor 1 stop RC6=1; RC7=0; //Motor 2 forward } |
Аналогичным образом, если правый датчик обнаруживает черную линию, то робот должен двигаться вправо, для этого нужно остановить двигатель 2, а двигатель 1 вращать в прямом направлении.
|
1 2 3 4 5 |
else if (RD2==1 && RD3==0) //Right sensor is over black line { RC4=0; RC5=1; //Motor 1 forward RC6=1; RC7=1; //Motor 2 stop } |
Если оба датчика обнаруживают черную линию, значит, роботу пора остановиться. Для этого нужно остановить оба двигателя.
|
1 2 3 4 5 |
else //Both Sensor over black line { RC4=1; RC5=1; //Motor 1 stop RC6=1; RC7=1; //Motor 2 stop } |
Тестирование работы робота
После того как аппаратная часть нашего проекта будет готова и программа будет загружена в микроконтроллер PIC, можно приступать к тестированию его работы. Перфорированную плату с установленным на нее микроконтроллером PIC мы использовали из нашего проекта мигания светодиодом.
Опустите робот на черную линию, включите его питание и вы должны увидеть как робот начнет следовать вдоль линии. Если какое то колесо вращается в обратном направлении (не в том, которое нужно), измените полярность подключения его двигателя. Если робот во время движения отклоняется от линии попробуйте поменять местами инфракрасные датчики.
Более подробно работу проекта вы можете посмотреть на видео, приведенном в конце статьи.
Исходный код программы
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |
/* Line Follower using PIC16F877A * Code by: B.Aswinth Raj * Dated: 11-09-2017 * More details at: www.CircuitDigest.com */ #include <xc.h> #pragma config FOSC = HS // Oscillator Selection bits (HS oscillator) #pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled) #pragma config PWRTE = ON // Power-up Timer Enable bit (PWRT enabled) #pragma config BOREN = ON // Brown-out Reset Enable bit (BOR enabled) #pragma config LVP = OFF // Low-Voltage (Single-Supply) In-Circuit Serial Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming) #pragma config CPD = OFF // Data EEPROM Memory Code Protection bit (Data EEPROM code protection off) #pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off; all program memory may be written to by EECON control) #pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off) void main() { TRISD2 = 1; TRISD3 = 1; //будут работать на ввод данных – к ним подключены инфракрасные датчики TRISC4 = 0; TRISC5 = 0; //Motor 1 pins declared as output (на вывод данных) TRISC6 = 0; TRISC7 = 0; //Motor 2 pins declared as output (на вывод данных) while(1) { if (RD2==1 && RD3==1) //оба датчика не видят черную линию { RC4=0; RC5=1; //Motor 1 forward RC6=1; RC7=0; //Motor 2 forward } else if (RD2==0 && RD3==1) //левый датчик видит черную линию { RC4=1; RC5=1; //Motor 1 stop RC6=1; RC7=0; //Motor 2 forward } else if (RD2==1 && RD3==0) //правый датчик видит черную линию { RC4=0; RC5=1; //Motor 1 forward RC6=1; RC7=1; //Motor 2 stop } else //оба датчика видят черную линию { RC4=1; RC5=1; //Motor 1 stop RC6=1; RC7=1; //Motor 2 stop } } } |